
Electrocommunication and neural code
One of the main issues on modern neuroscience is how to decode the so-called "neural code". Somehow all of our sensory stimuli are encoded in our neural networks as electric patterns of neural activation. As the information flows through the cells, the synapses and the brain's internal dynamics process this "electric language", generating behaviour, feelings, thoughts; analogous to how a processor computes a "digital language" into apps, a mobile phone translates radio signals into sound, industrial machines produce manufactured goods from raw materials. Understanding the transformation rules involved in this language processing tells us the limits of the inherent process coded by this language.
Usually, real-time interaction with neurons involves invasive procedures, such as cirurgical positioning of electrodes (either intracelularly or very near the cell bodies), which may disturb the system. Despite these limitations, many results have been achieved with this kind of study. However, following the Krogh's principle from neuroethology ("for such a large number of problems there will be some animal of choice, or a few such animals, on which it can be most conveniently studied") some research found out that electric fish might be good toy models for neural coding.
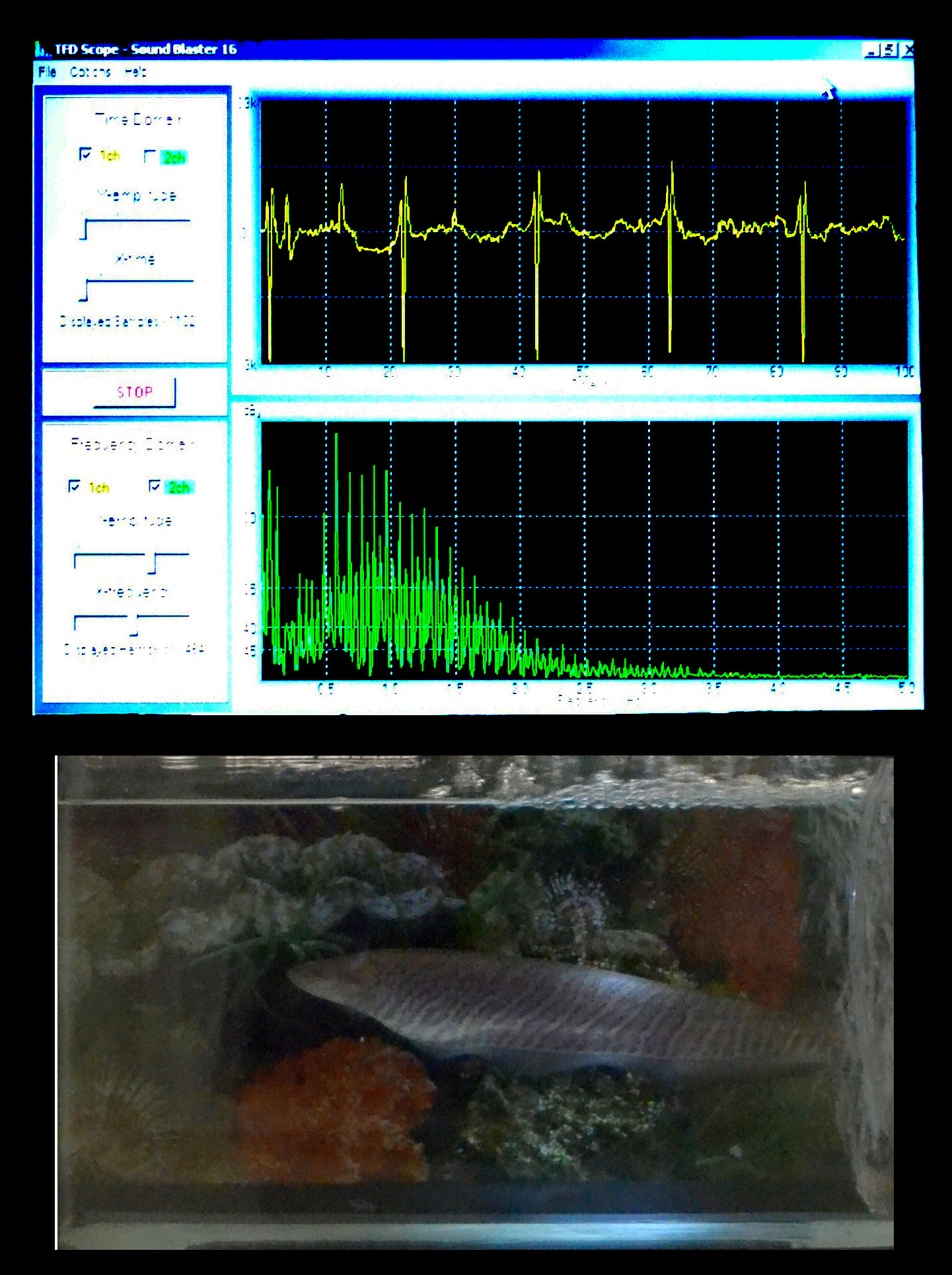
The reason for such a belief resides on the fundamental mechanism involved in the generation of their electric pulses. Weakly electric fish present a self-generated electric pattern, very similar to the action potential generated by neurons (Figure 1). These pulses are detected by electroreceptors on their skin. Using the distortions in their train of pulses, they can locate themselves in a known environment – a phenomenon called active electrolocation. Additionally, they can also detect pulses from other fish, which is likely used for communication (e.g., to establish territorial dominance).
Their signal can be easily detected introducing electrodes in the water. This is a completely harmless method, with no need for surgery! On the other hand, feedback can be given to the fish with a couple of wires sending electric signals. This creates two very interesting scenarios: you can have two fishes from different aquariums communicating, or even a "model robot fish" interacting with a real fish.
Using techniques from Dynamical Systems, Information Theory and Stochastic Processes, we can develop tools to interact with fish in real-time, correlating the fish electric signal with its behaviour to generate controlled stimuli, allowing us to analyze the relevant model parameters for animal communication, and therefore to unveil the "grammar" of this "language". The development of tools for conducting experiments, for data analysis and for correlating the results with a neural code are the main goals of our research.